快速傅立叶变换
目录
已知 $n$ 维向量 $v\in\mathbb{C}^n$,它的 离散傅立叶变换 $\mathcal{F}(v)$ 是一个 $n\times n$ 矩阵 $M_n$ 与它的乘积: $$ \mathcal{F}(v) = M_n v. $$
根据矩阵乘法公式,把 $M_n$ 的每一行与 $v$ 分别做向量积,即可得到结果。每一行做向量积耗时 $O(n)$,一共 $n$ 行,所以用矩阵乘法计算的时间复杂度为 $O(n^2)$。
快速傅立叶变换算法可以达到 $O(n\log n)$ 的时间复杂度(用 Python 实现,仅需十几行代码)。
快速傅立叶变换之所以比矩阵乘法高效,是因为 $M_n$ 有特殊的结构。这种结构,可以采用分而治之的思想(分治法),来提升计算效率。
离散傅立叶变换
下面介绍矩阵 $M_n$ 的定义。
考虑复数域上的 $n$ 次单位根 $w$,即 $w^n = 1$,我们有 $$ w = e^{\frac{2\pi k i}{n}}, \quad k = 0, 1, \ldots, n-1. $$ 令 $w_n$ 代表第 $n$ 个单位根,即 $$ w_n = e^{\frac{2\pi(n-1)i}{n}} = e^{-\frac{2\pi i}{n}}. $$ 令 $w_n^{j,k}$ 代表 $w_n$ 的 $j\times k$ 次方,其中 $j, k$ 分别代表行和列的下标。 需要注意,下标从0开始计数,即 $j, k = 0,1,\ldots, n-1$ 。
矩阵 $M_n$ 的定义如下:
$$ M_n = \begin{bmatrix} w_n^{0,0} & w_n^{0,1} & \ldots & w_n^{0,n-1}\newline w_n^{1,0} & w_n^{1,1} & \ldots & w_n^{1,n-1}\newline & & \vdots &\newline w_n^{n-1,0} & w_n^{n-1,1} & \ldots & w_n^{n-1,n-1} \end{bmatrix} $$
下文假设 $n$ 是2的幂次方,即存在整数 $k > 0$ 使得 $n = 2^k$。
快速傅立叶变换
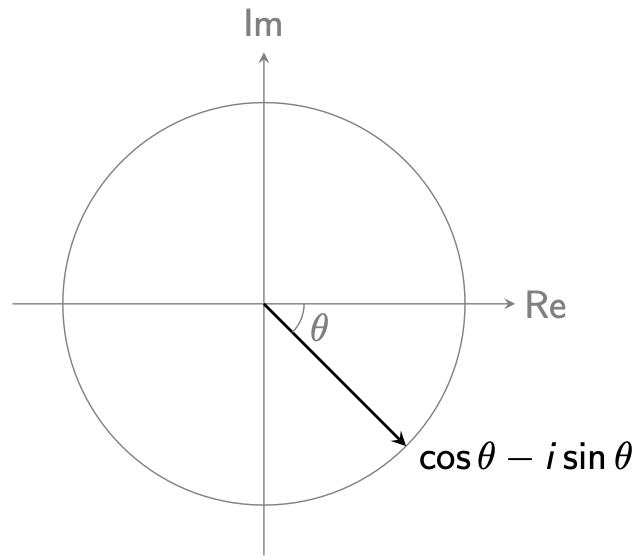
我们知道 $$ w_n = e^{-\frac{2\pi i}{n}} = \cos(\frac{2\pi}{n}) - i\sin(\frac{2\pi}{n}), $$ 它是复平面上的一个单位向量(如下所示):
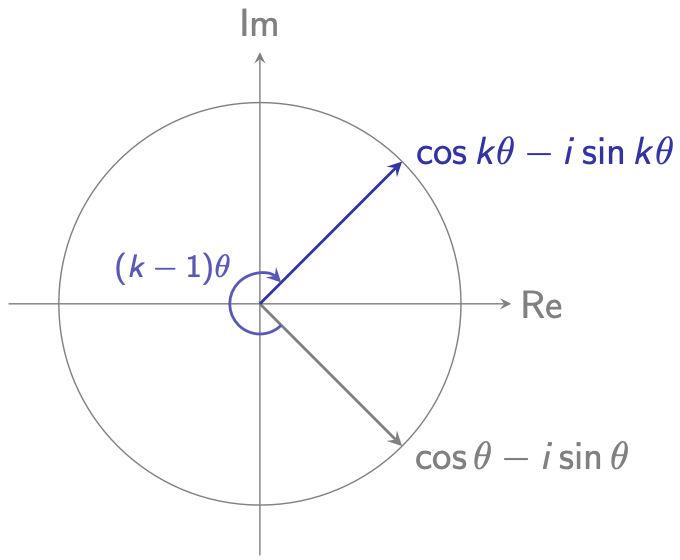
令 $\theta = \frac{2\pi}{n}$,那么 $w_n^k$ 相当于把 $w_n$ 沿着顺时针方向旋转 $(k-1)\cdot\theta$ (如下所示):
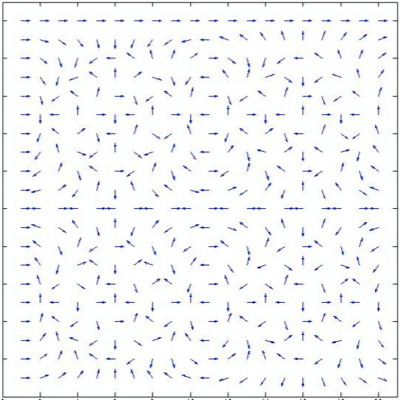
有了这样的认知,我们可以对 $M_n$ 进行可视化。以 $M_{16}$ 为例,如下图所示:
一咋看有些混乱,下面把它分成四个子矩阵,按颜色区分:
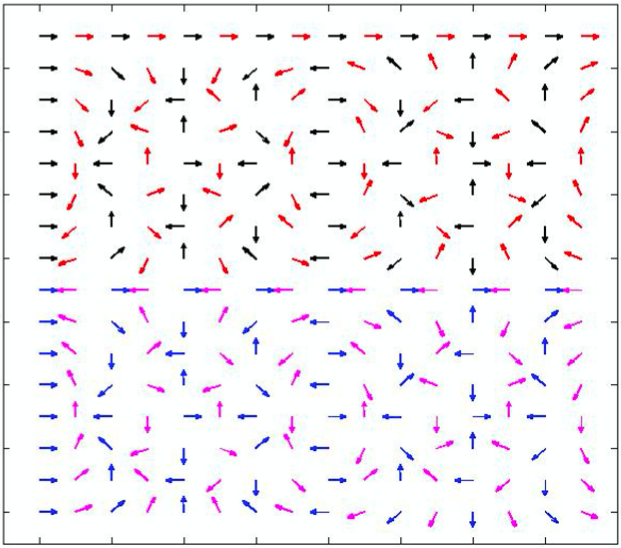
仔细观察,我们发现:
1、黑色矩阵和蓝色矩阵相同,它们实际上是 $M_8$;
2、每个红色向量,相当于把它“左边”的黑色向量,顺时针方向旋转,其中旋转角度的大小取决于向量所在的行。
设黑色元素为 $w_n^{ik}$,那么它右边的红色元素为 $w_n^{ik}\cdot w_n^i$。这样一来,红色矩阵可以表示成 $$ M_8 \times u, \quad u= \begin{pmatrix} w_n^0\newline w_n^1\newline \vdots\newline w_n^{n-1} \end{pmatrix} = \begin{pmatrix} w^0_8\newline w^1_8\newline \vdots\newline w^7_8 \end{pmatrix}, $$ 其中 $\times$ 代表把 $M_8$ 中的每一列,与 $u$ 按元素逐个相乘,即 $$ M_8\times u = \begin{bmatrix} w_8^{0,0}\cdot w_n^0 & w_8^{0,1}\cdot w_n^0 & \ldots & w_8^{0,7}\cdot w_n^0\newline w_8^{1,0}\cdot w_n^1 & w_8^{1,1} \cdot w_n^1 & \ldots & w_8^{1,7}\cdot w_n^1\newline & & \vdots &\newline w_8^{7,0} \cdot w_n^7& w_8^{7,1} \cdot w_n^7& \ldots & w_8^{7,7}\cdot w_n^7 \end{bmatrix} $$ 3、紫色矩阵与红色矩阵符号相反,即 $-M_8\times u$。 即换句话说,它相当于把红色向量顺时针旋转180度。
有了上面的观察,我们即将得到快速傅立叶变换的计算方法。
第一步,先把 $M_n$ 的列重排,即,偶数列放在一起,奇数列放在一起。新的矩阵记作 $\bar{M}_n$,我们有
$$ \bar{M_n} = \begin{bmatrix} M_{n/2} & M_{n/2}\times u \newline M_{n/2} & -M_{n/2}\times u \end{bmatrix}. $$
第二步,为了不改变计算结果,还要把 $v$ 中的元素按下标重新排列,即,偶数位和奇数位分别单独放一起。
新的向量记作 $\bar{v}_n$,我们有
$$ \bar{v} = \begin{bmatrix} v_{\text{even}} \newline v_{\text{odd}} \end{bmatrix}, $$
其中 $$ v_{\text{even}} = \begin{pmatrix} v_0\newline v_2\newline \vdots\newline v_{n-2} \end{pmatrix}, \quad v_{\text{odd}} = \begin{pmatrix} v_1\newline v_3\newline \vdots\newline v_{n-1} \end{pmatrix}. $$
第三步,计算 $\bar{M}_n$ 和 $\bar{v}$ 的乘积。
$$ \begin{aligned} \mathcal{F}(v) & = M_n v = \bar{M_n} \bar{v} \newline & = \begin{bmatrix} M_{n/2} & M_{n/2}\times u\newline M_{n/2} & -M_{n/2}\times u \end{bmatrix}\begin{bmatrix} v_{\text{even}}\newline v_{\text{odd}} \end{bmatrix}\newline & = \begin{bmatrix}M_{n/2}v_{\text{even}} + M_{n/2}v_{\text{odd}}\times u \newline M_{n/2}v_{\text{even}} -M_{n/2}v_{\text{odd}}\times u \end{bmatrix} \end{aligned} $$
于是得到下面的递归表达式。 $$ \mathcal{F}(v) = \begin{bmatrix} \mathcal{F}(v_{\text{even}}) + \mathcal{F}({v_{\text{odd}}})\times u \newline \mathcal{F}(v_{\text{even}}) - \mathcal{F}({v_{\text{odd}}})\times u \newline \end{bmatrix}. $$ 这就是快速傅立叶变换算法,可以用递归的方式实现(代码见下文)。
下面分析计算复杂度。
令 $T(n)$ 代表向量长度为 $n$ 的离散傅立叶变换的计算时间。根据上述公式,计算 $\mathcal{F}(v_{\text{even}})$ 和 $\mathcal{F}(v_{\text{odd}})$ 分别耗时 $T(n/2)$,拼接耗时 $O(n)$。我们有 $$ T(n) = 2T(n/2) + O(n). $$ 根据主定理(Master theorem),我们得到 $T(n) = O(n\log n)$。
算法实现
下面用 Python 实现快速傅立叶变换。
def FFT(v):
""" 快速傅立叶变换
注意:输入向量 v 的长度是2的幂次方。
:param v: array like
:return: array like(复向量)
"""
n = len(v)
if n == 1:
return v
v_even = FFT(v[0:n:2])
v_odd = FFT(v[1:n:2])
u = [w_n**i for i in range(n//2)]
part1 = [v_even[i] + u[i]*v_odd[i] for i in range(n//2)]
part2 = [v_even[i] - u[i]*v_odd[i] for i in range(n//2)]
return part1 + part2
逆变换
再看看傅立叶变换的逆变换。
计算 $M_n \cdot M_n$,我们得到
$$ M_n \cdot M_n = \begin{bmatrix} 1 & 0 & \cdots & 0 & 0\ 0 & \cdots & 0 & 0 & 1 \ 0 & \cdots & 0 & 1 & 0 \ \vdots & & \vdots & & \ 0 & 1 & 0 & \cdots & 0 \end{bmatrix} \times n $$ 我们有,
$$ \frac{1}{n}M_nM_n v = \begin{pmatrix} v_0\ v_{n-1}\ v_{n-2}\ \vdots\ v_1 \end{pmatrix} =: \sigma_{n-1}(v). $$
其中 $\sigma_{n-1}(v)$ 代表对向量 $v$ 的后 $n-1$ 个元素按下标逆序排列。
注意到 $\sigma_{n-1}(\sigma_{n-1}(v)) = v$,我们有 $$ \begin{aligned} \frac{1}{n}\sigma_{n-1}[M_n(M_n v)] = v \end{aligned} $$ 即,
$$ \mathcal{F}^{-1} = \frac{1}{n}\sigma_{n-1}\mathcal{F}. $$ 下面是 python 实现。
def iFFT(v):
"""
傅立叶变换的逆变换
注意:输入向量 v 的长度是2的幂次方。
:param v: array like
:return: array like(复向量)
"""
n = len(v)
u = FFT(v)
x = [i/n for i in u] # u 除以 n
# 对后n-1个元素逆序排列
y = x[1:]
y.reverse()
return x[0:1] + y
快速傅立叶变换的时间复杂度是 $O(n\log n)$,比直接用矩阵乘更高效,原因在于矩阵 $M_n$ 具有特殊结构。通过观察发现,$M_n$ 可以被拆解成四个与 $M_{n/2}$ 有关联的子矩阵。基于分治法(Divide and Conquer)的思想,对每个子问题递归求解,从而节省计算时间。